Robotic additive product systems
My work explores how humans and intelligent systems co-create through design, robotics, and digital fabrication. It examines the relationship between toolpath, material behaviour, and human decision-making during fabrication. Spanning research, industry collaboration, and built outcomes, these projects trace the path from concept to physical realisation.

RMIT Library (Roland Snooks)
Architecture / computational design / robotic fabrication
In my role at UAP, I contributed to the fabrication phase of a project led by Roland Snooks, supporting the realisation of complex computationally generated architectural geometry through robotic 3D printing.
My role focused on managing the print process during fabrication, monitoring material behaviour, layer formation, and print stability in real time. This involved responding to issues such as material inconsistency and ensuring the successful translation of digital design into a stable physical outcome.
This work highlights the importance of human oversight within automated fabrication systems, where real-time judgement remains critical to achieving reliable results.
Image Source-Design Robotics: The Queensland University of Technology (QUT)
Robotic 3D Printing
(QCAD, Griffith)

Augmented fabrication / additive systems
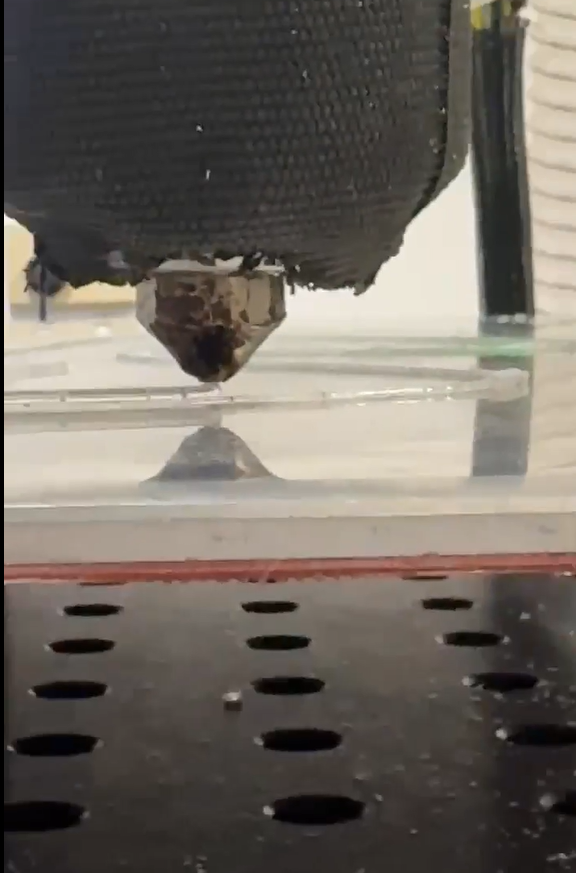
A robotic 3D printing study I have developed at Griffith University, exploring how design intent translates into material outcomes through robotic extrusion.
My work investigates toolpath design, material behaviour, and the designer's role in guiding fabrication in real time. This project forms part of a broader research agenda into augmented fabrication and human-robot collaboration in making.
The test prints below illustrate early-layer formation and highlight challenges, such as bubbling caused by insufficiently dried PETG. These observations informed subsequent adjustments to material preparation and print parameters
Image Source - Griffith University

Spinal Life Wheelchair Grips
Assistive technology / co-design / additive manufacturing
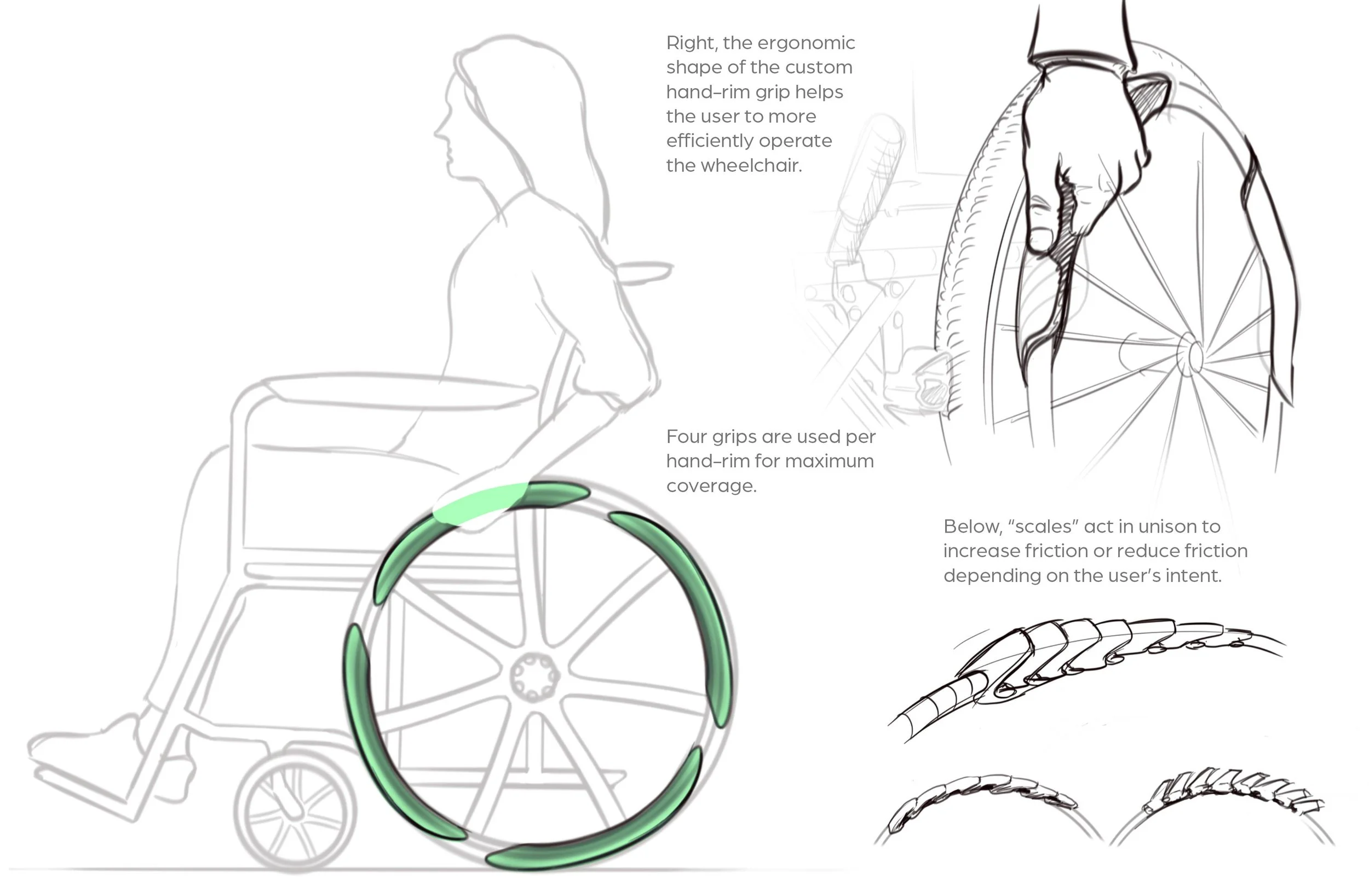
A collaborative project with Spinal Life Australia, The Hopkins Centre (Griffith University), and ARM Hub exploring the use of 3D printing to develop customised assistive technologies for people with spinal cord injuries.
My role spanned design, fabrication, and project coordination, including facilitating co-design workshops with end-users, clinicians, and industry partners, and translating these insights into prototype development and testing.
This included iterative prototyping of wheelchair handrim grips, material testing, and refinement based on user feedback. The project demonstrated how co-design and additive manufacturing can support the development of more accessible, customised, and rapidly deployable assistive technologies.
Image Source - ARM Hub, Spinal Life Australia and The Queensland University of Technology (QUT)

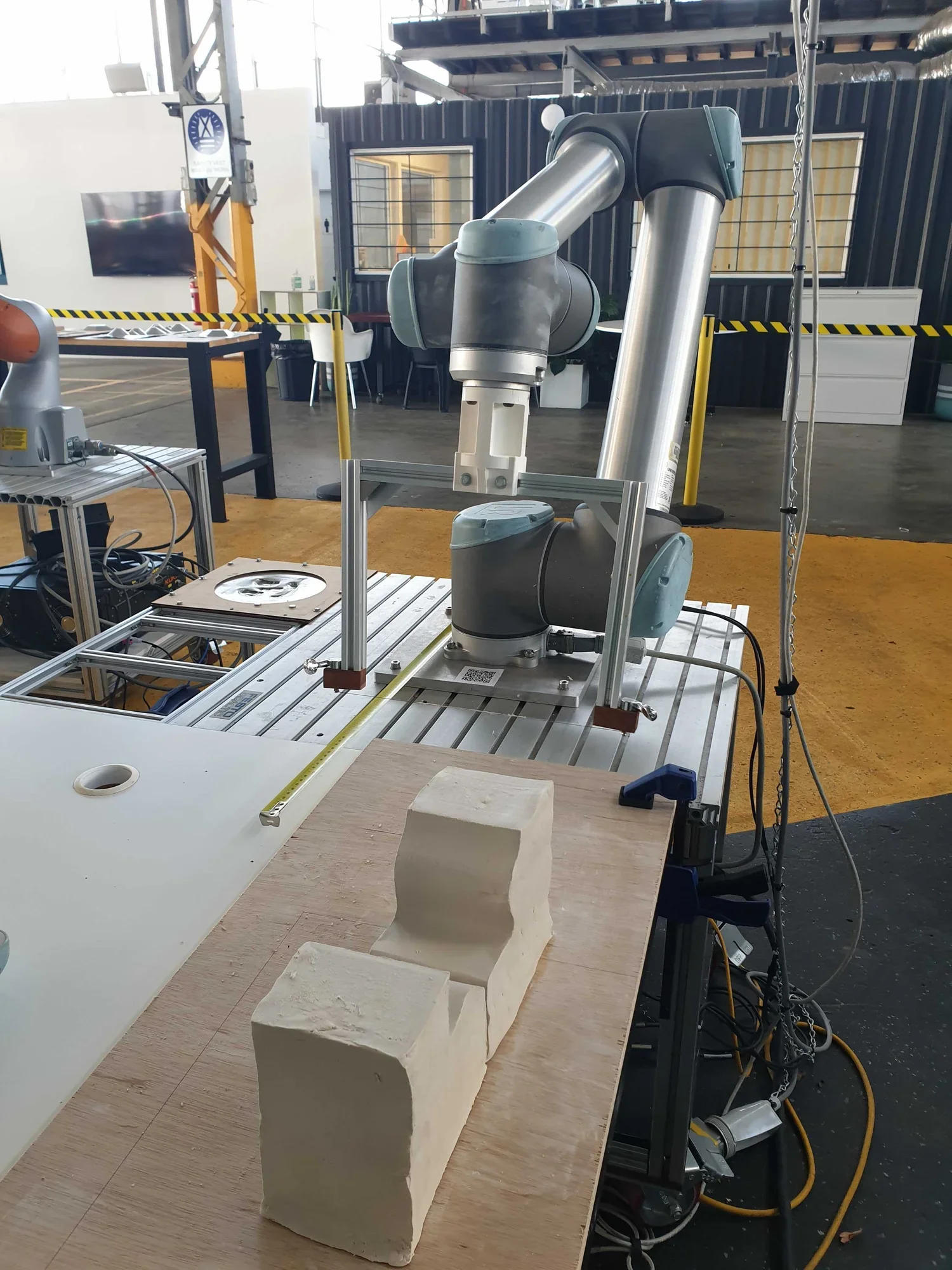
In 2021, I collaborated with ARM Hub and QUT on a project led by A/Prof Muge Fialho Teixeira that explored robotic fabrication on experimental clay substrates. The project centred on a UR10 collaborative robot used for hot-wire cutting, extending a technique typically used for foam into clay and opening up new design possibilities.
My contribution focused on the design and development of a custom 3D-printed end effector and a U-shaped support frame, enabling precise and stable robotic operation tailored to the project’s requirements.
The project demonstrated the potential of robotics in design-led fabrication and highlighted the importance of interdisciplinary collaboration in expanding material and formal exploration.
Image Source - Advanced Robotics for Manufacturing Hub (ARM Hub) and The Queensland University of Technology (QUT)
Custom robot end-effectors

